Tricity Labs
Open-source robotics lab focused on reproducible, budget-friendly field robotics.
Tricity Labs
Tricity Labs is an open-source robotics lab with a simple philosophy: build capable field robots that anyone can reproduce, on a budget, using freely available tools and hardware.
The lab focuses on two platforms, a ground rover and an aerial drone, both aimed at autonomous data collection and mapping in challenging outdoor environments.
Projects
Fennecus : Offroad Autonomous UGV
An offroad ground robot equipped with GPS-RTK for centimeter-level positioning, designed to navigate forests and agricultural terrain autonomously, collect data, and index it.
Goals:
- Reproducible design with full documentation and open-source code
- Budget-friendly bill of materials
- Safe autonomous navigation in unstructured, offroad terrain
Goéland : Autonomous Research UAV
A fixed-wing or multirotor platform for aerial data collection over large areas.
Goals:
- High-resolution photogrammetry and mapping
- 3D reconstruction of forests and industrial structures (e.g. power towers)
- GPS-denied localisation using visual odometry / camera-only methods
Dev Log
A running log of progress, experiments, and milestones across both platforms.
Contents
2026
Week 19 — Camera & Gerboise integration
- RP2040 (Raspberry Pi Pico) microcontroller publishing at 10 Hz over GPIO and ROS.
- LiDAR and camera are now solidary (rigidly mounted together).
- All ROS2 source repos have been merged.
- Extrinsic calibration algorithm selected.
- ZFS mount set up with deduplication, compression, and automatic daily snapshots for data recording.
- Installed and trained for FPV flying — not directly used in the project but necessary to safely operate the drone.
- ESC integration with rover and ROS2 completed.
Week 18 — Updated logs, finished comparing PCD and GS
- Updated the dev log.
- Finished comparing Point Cloud Data (PCD) from the LiDAR against Gaussian Splatting reconstructions.
- Got a proper version of georefereced Gaussian splats working using Cesium.
- The RTK GPS is working and publishing correctly on ros.
- Micro ros is functionnal
- New updated order list (THe motors are not rated for 6S battries and some other )
Week 17 — Glomap, Lichtfeld, Gerboise ready
3D Reconstruction pipeline experiments:
- GLomap works significantly better and faster than Colmap. Key advantage: optimises over all images simultaneously rather than incrementally. Limitation: struggles when images lack sufficient overlap or parallax.
- Lichtfeld outperforms Nerfstudio for this use case. Tested various parameters — GSP+ gives the best results but behaves quite differently from others.
- Lichtfeld trained with camera poses estimated from LiDAR + odometry (via Colmap) works well and is faster than a full GLomap run. In this setup the LiDAR is used for positioning only, not as a point cloud reference.
- Next step: proper camera–LiDAR extrinsic calibration, then use LiDAR data either combined with Depth Anything v3 or standalone as a geometric prior to reduce free-floating noise.

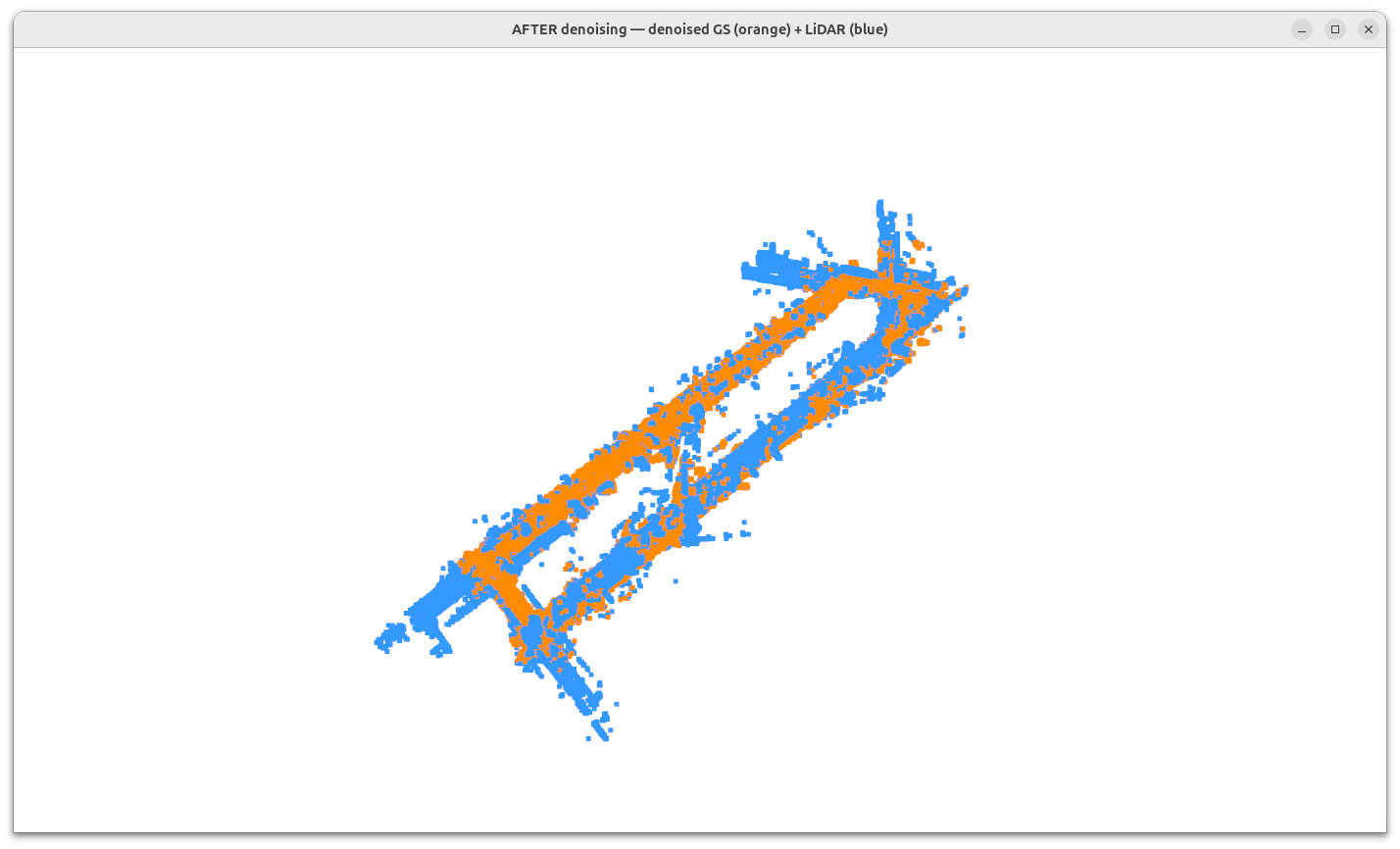
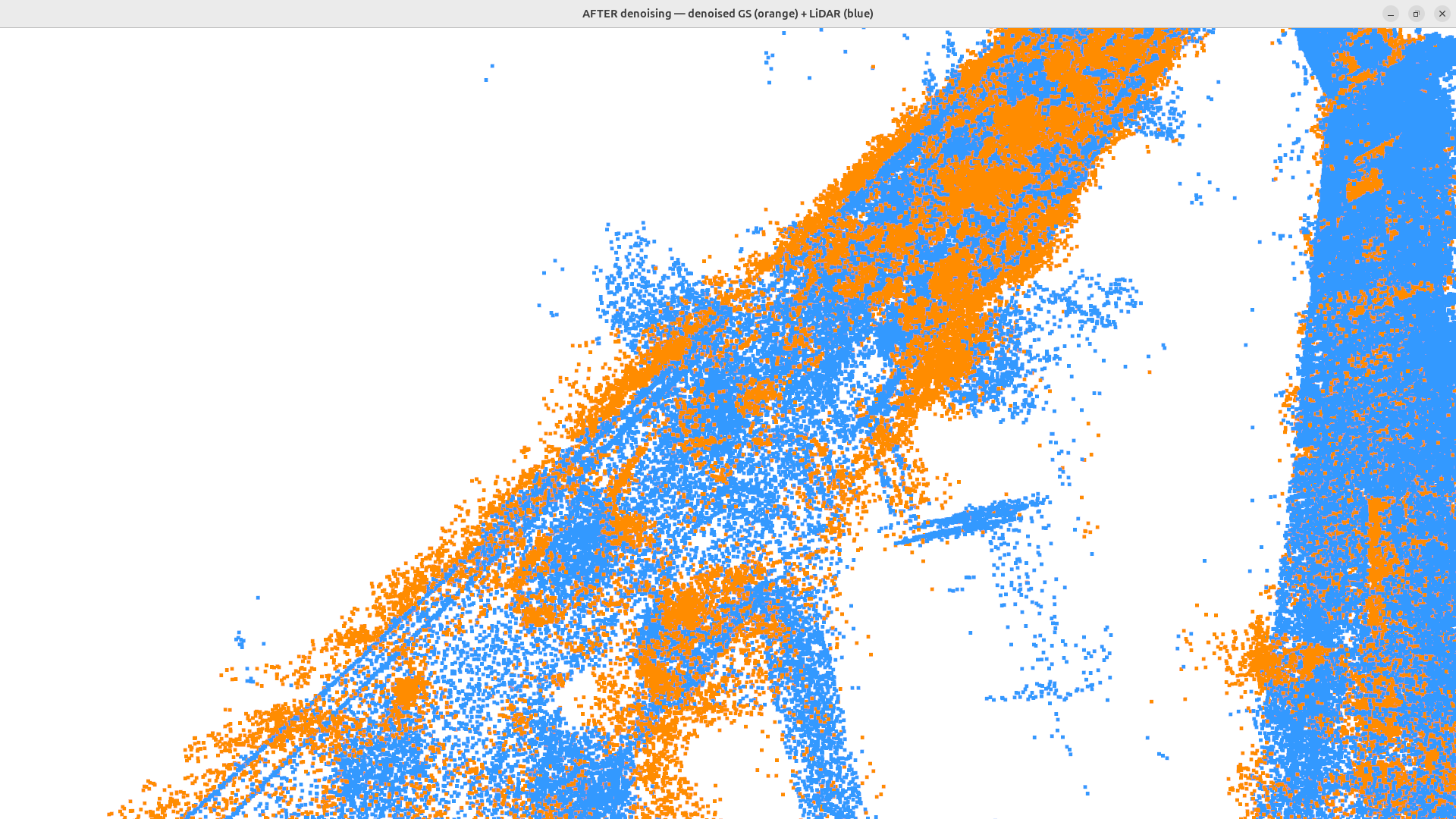
PCD vs Gaussian Splatting comparison:
Wrote a script to compare LiDAR point clouds against GS reconstructions. Some similarity is visible but the GS output is still too noisy for reliable filtering.
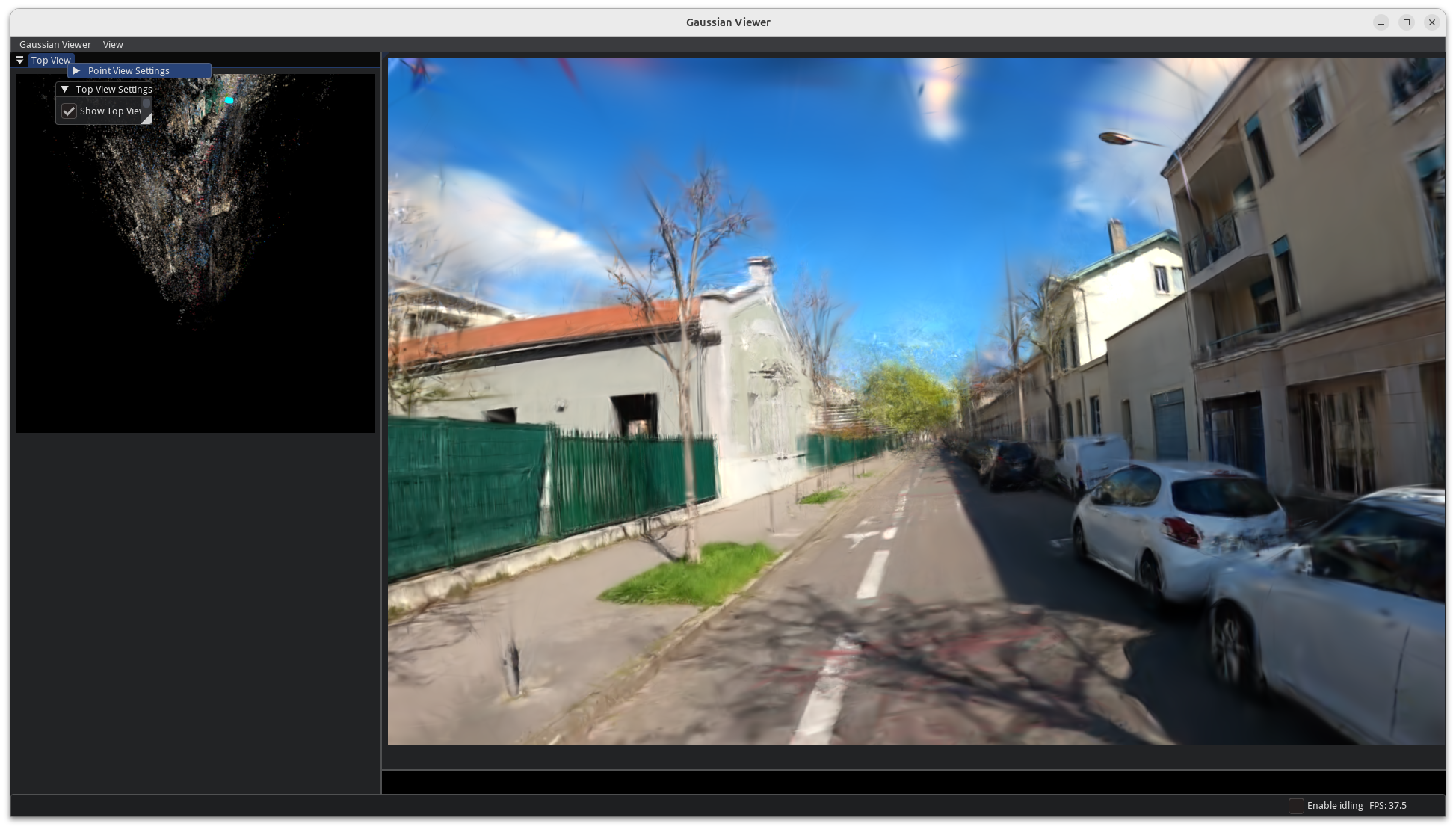
On-the-fly NVS (graphdeco-inria/on-the-fly-nvs):
Among the best viewer results so far, but not yet fully exploitable in practice.
Gerboise (rover) — first drive:
Wheels, frame and VESC ESC are working. ROS2 drivers and Xbox controller confirmed operational.

April 2026 — Hardware orders & setup
- Tricity Labs page created on the site.
- Rover project scoped: GPS-RTK module selected, chassis design started.
- Drone project scoped: camera-based localisation pipeline research started.
- Bought an Ardusimple RTK-GPS
- Had a LiDAR laying around (Livox Avia)
20/04/2026
- Part list for drone, camera and rover finalised.
- RTK module received — experiments to start soon.
21/04/2026 — Main hardware order placed (AliExpress, ~676 €)
| Component | Details | Price |
|---|---|---|
| Flight & Navigation | ||
| NxtPX4v2 Flight Controller | H743 & BMI088, PX4/Ardupilot | 61.39 € |
| LR900 LoRa Telemetry Radio | 868 MHz, 30 km range | 56.69 € |
| MG-903 GPS/GNSS + Compass | IST8310 | 17.19 € |
| MicoAir Optical Flow + Lidar | MTF-01P | 31.19 € |
| 60A 4-in-1 BLheli ESC | 30.5×30.5mm stack | 30.39 € |
| Radio | ||
| RadioMaster Pocket Transmitter | Hall gimbal, ELRS M2 LBT | 67.25 € |
| RadioMaster RP1 ELRS Receiver | 2.4 GHz Nano | 20.59 € |
| Frame & Structure | ||
| ZD550 Carbon Fiber Frame | Quadcopter 550mm | 73.69 € |
| 2020 Aluminum Profile Brackets | ×5 | 8.38 € |
| M5 T-Nuts 2020 profile | 50pcs | 3.49 € |
| Power | ||
| HRB LiPo 22.2V 5000mAh | XT60 | 53.39 € |
| DC-DC Buck Converter | 1200W step-down | 20.59 € |
| Power Distribution Board XT60 | 4-channel | 10.09 € |
| UBEC 5V 3A | Anti-interference, 2S–12S | 2.33 € |
| XT60 Y-Splitter Cable | 1F to 2M, 14AWG | 3.49 € |
| 14AWG Solar Cable | 10m B/R | 18.59 € |
| Motors & Props | ||
| SURPASS C3548 790KV Motors | ×4 | 120.76 € |
| Gemfan 1238 Carbon Props | ×3 pairs CW/CCW | 15.27 € |
| Sensors & Wiring | ||
| M12 LiDAR Cable | 1-to-2 XT60 for Livox, 0.15m | 22.39 € |
| JST SH1.0mm Connector Kit | 3P–12P with 28AWG crimped | 11.99 € |
| RJ45 Cat7 Coupler | ×5 | 3.49 € |
| Electronics & Dev | ||
| ESP32 WROOM-32 Dev Board | CH340C TYPE-C | 3.99 € |
| CH340N USB-TTL Downloader | Serial port, single-chip | 1.60 € |
| Connectors & Misc | ||
| Amass XT60H Connectors | 5 pairs | 4.29 € |
| 4.0mm Bullet Connectors | 200pcs, male+female | 5.19 € |
| Servo Tester 3CH | CCPM meter | 1.62 € |
| Banana connectors | Local purchase | ~5.00 € |
| Total | ~675.92 € |
Additional hardware (separate purchases):
- Ardusimple RTK-GPS — 270 €
- VESC Flipsky ESC (rover) — 180 €
- Industrial camera MV-CU013-AOGC + 6mm lens (hardware sync) — 200 € + 32€ Taxes
- Ammunition box (battery enclosure) — 15 €
- 18650 cells for drone and rover — ~30 € (considering: LiFePo4 ×14 1100mAh/30A, Li-ion ×10 3200mAh/10A, Li-ion ×5 2100mAh/30A)
2025
Q3–Q4 2025 — Initial research
- Initial research on offroad autonomous navigation approaches (ROS2, Nav2, custom planners).
- Benchmarked GPS-RTK modules for cost vs. accuracy trade-offs.
- Evaluated open-source photogrammetry pipelines (OpenDroneMap, Colmap) for 3D reconstruction.
- Studied GPS-denied localisation methods: ORB-SLAM3, OpenVINS.
Backlog of research & development subjects
- Urban and offroad long-range 3D reconstruction using LiDAR and cameras
- Visual position system (for drones and rover)
- Advanced and fast rover
- Georeferenced automated data collection (using Gerboise)
- FOSS LiDAR and camera 3D reconstruction (simple static training algorithm, then more complex)
- Simple aerial mapping
- Publish online georeferenced GS/PCD
- Fully autonomous offroad rover (Wayve/Hyperlabs style)
- UI for viewing data, positions etc. of the rover and data collection
LATER:
- End-to-end autonomous navigation for the built world (Chantiers)
- Tethered drones
- 16 minutes cloud prediction using cameras
This log is updated as work progresses. For questions or collaboration, reach out at tricity at iliasamri.com.